关键词 |
焦作液压推动器制动器,防风鉄楔制动器,CQP25.4(30.40.)盘式制动器,QP12.7-A气动钳盘式制动器 |
面向地区 |
全国 |
悬挂链输送机是一种三维空间闭环连续输送系统,适用于车间内部和车间之间成件物品的自动化输送。根据输送物件的方法,可分为通用和轻型的牵引式悬挂输送、通用积放式和轻型积放式的推式悬挂输送。 悬挂链,采用滚珠轴承作为链条走轮,导轨均选用16Mn材质经过深加工而成,使用寿命在5年以上。链条节距常用的有150/200/240/250等,单点承重也各不一样。同时通过选择吊具类型,可增加链条的单点承重。该输送线能随意转弯、爬升,能适应各种地理环境条件。该输送线主要用在车间内的物料空中配送上,设计合理的方案,能将仓库、装配线等相关节点有机的结合起来,可在大程度上理顺车间的物流,产生更大的效益。该输送线也能用作摩托车车架的部装,以及喷涂设备的烘干输送设备
发明内容本实用新型的目的是提供一种起升控制系统用液压推动器接触器,实现更好地提 高桥式吊车起升机构的制动器控制系统的安全性,降低制动器故障率。 为解决上述技术问题,本实用新型的技术方案是 起升控制系统用液压推动器接触器,其特征在于,在液压推动器的动力回路上,采
用串联方式设置两套接触器触点。 所述的接触器线圈在控制回路中并联。 与现有技术相比,本实用新型的有益效果是有效地避免了由于接触器主触点粘 连或机械部分卡阻,接触器不能及时断开,使液压推动器无法得到控制的现象发生,提高桥 式吊车起升机构制动器电气控制系统的安全性,降低了制动器的故障率,取得了可观的经 济效益,使用效果良好。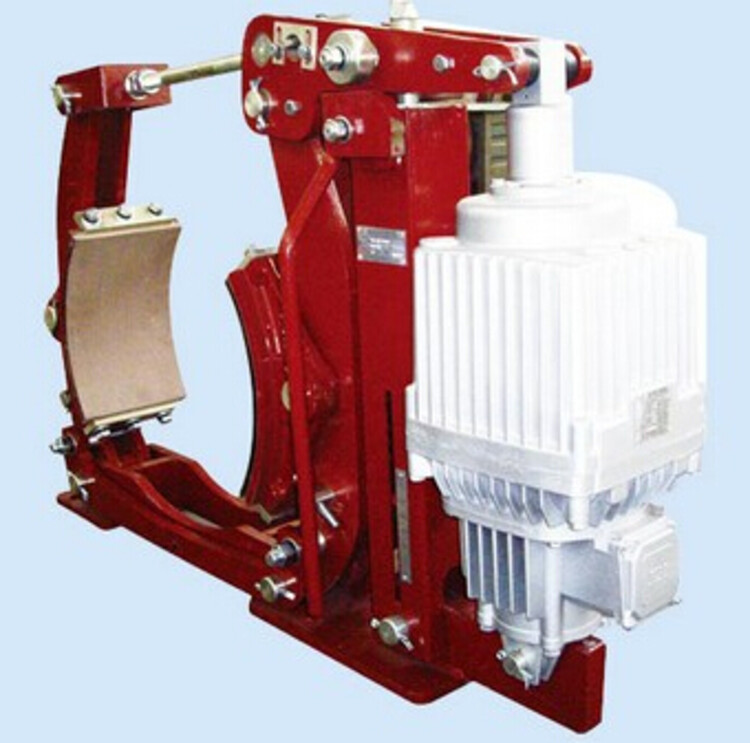
线与受控制器控制控制回路电源1#、2#线采用并联方式连接,起到两台接触器同时吸合的目的。 为了避免由于接触器主触点粘连或机械部分卡阻,接触器不能及时断开,致使液 压推动器无法得到控制的情况,从而提高桥式吊车起升机构制动器电气控制系统的安全 性,也同时减少了因接触器故障而出现较长的处理时间,大幅度地提高了通用桥式吊车的 作业率。 本实用新型控制原理及元件动作如下 1、当桥式吊车起升机构制动器两台控制接触器在正常工作状态下,操作控制手柄 离开零位和回到零位时,由于两台制动器控制接触器K71、 K81线圈控制线采用并联方式连 接,这样可以使接触器线圈同时得电吸合和断电释放,元件动作为当操作控制手柄离开零 位时,1#、2#线受控制器控制使两台制动器接触器K71 、K81线圈同时得电,两台制动器接触 器K71、 K81主触头同时闭合,使T1S、 T2S、 T3S液压推动器三相动力电源接通,液压推动器 YTS电机转动,制动器正常打开,当操作控制手柄回到零位时,1#、2#线受控制器控制使两 台制动器接触器K71、 K81线圈同时失电,两台制动器接触器K71、 K81主触头同时断开,使 T1S、T2S、T3S液压推动器三相动力电源切断,液压推动器YTS电机停止转动制动器闭合,实 现了与一台制动器接触器控制同样的控制目的。 2、当桥式吊车起升机构制动器其中一台控制接触器出现主触点粘连或机械部分 卡阻等故障的工作状态下(例如控制接触器K71出现故障),操作控制手柄回到零位时, 1#、2#线受控制器控制使两台制动器接触器K71、K81线圈同时失电,接触器K71故障不能 及时断开,由于两台制动器接触器K71、K81的动力回路L21、L22、L23与液压推动器三相动 力电源T1S、T2S、T3S采用串联方式连接。此时接触器K81正常工作,制动器接触器K81主 触头断开,同样切断T1S、T2S、T3S液压推动器三相动力电源,使液压推动器YTS电机停止转 动制动器闭合,所以仍然可以达到断开液压推动器YTS的电源,达到制动器的正常工作,消 除因接触器出现主触点粘连或机械部分卡阻等故障发生的事故。 由上述分析可知吊车起升控制系统采用液压推动器接触器控制,可以防止由于 其中一台接触器主触点粘连或机械部分卡阻,接触器不能及时断开,致使液压推动器无法 得到控制的情况发生,这样连接的目的是提高桥式吊车起升机构制动器电气控制系统的 安全性,避免了重物高空坠落等严重的安全事故,也同时减少了因接触器故障而出现较长 的处理时间,大幅度地提高了通用桥式吊车的作业率。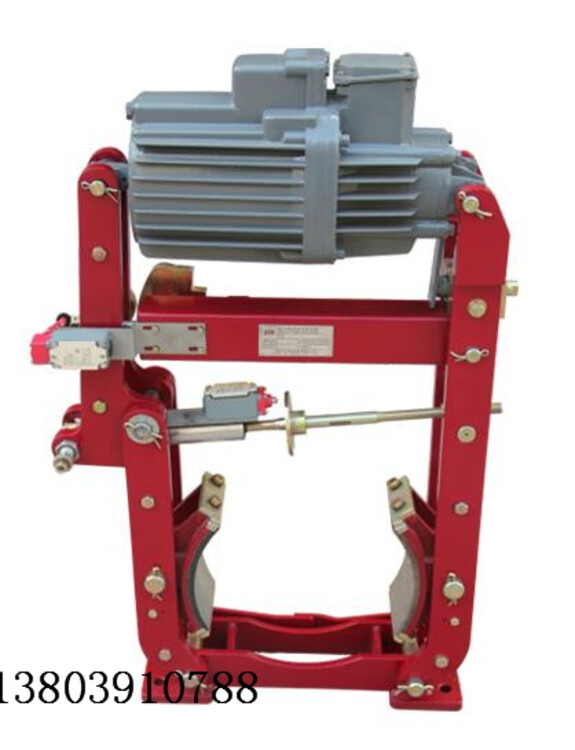
处于通电的状态, 一旦吊车行至滑线接头处时,就有瞬间断电的现象发生,这时夹轨器立即
启动限制设备运动,运行中的设备惯性力受到约束,就有倾翻趋势;待过了滑线接头处后,
电源恢复供电,由于滞后现象存在,设备又无法立即恢复原运动,使设备无法正常运行,出
现保护装置与正常工作相互干扰的现象;由于液压缸漏油,电磁阀频繁工作(超出正常),
损坏率,使用可靠性受到影响限制;又由于备件组织受限等因素存在,使设备正常工作
受到很大限制,也增加了维修工作的难度。
发明内容本实用新型克服了现有技术中的不足,提供了一种结构简单,操作方便,稳定可靠 的龙门吊夹轨器。 为了解决上述问题,本实用新型采用以下技术方案 —种龙门吊夹轨器,包括底板、夹臂、挡杆、夹紧螺栓和转轴,底板固定在龙门吊底 部靠近轨道的位置,底板上端设有挡杆,底板下端设有转轴,夹臂底端与转轴连接,夹臂头 部内侧设有凹槽,两个夹臂之间通过夹紧螺栓连接。 所述的凹槽的位置与轨道侧面的位置相对应,夹臂头部至凹槽底边的长度小 于轨道凹陷处的高度。 与现有技术相比,本实用新型的有益效果是 1、采用简单的机械结构设计,稳定可靠的锁定龙门吊车体,不会与正常工作发生 干扰,不损伤车体设备,正常生产。 2、本实用新型装置结构设计简单合理,不易损坏,寿命长,维修简单,从而节省了 维修成本,提高了企业效益。
所述电磁阀的进气口与所述气源连接,所述第二电磁阀的进气口与所述电磁阀的排气口连接,所述第三电磁阀的进气口与所述第二电磁阀的排气口连接;所述电磁阀的出气口与所述气控换向阀的进气口连接,所述第二电磁阀的出气口与所述气控换向阀的第二进气口连接,所述第三电磁阀的出气口与所述气控换向阀的第三进气口连接。
根据本实用新型的另一方面,提供一种工程车辆,包括具有气控换向阀的液压系统,所述工程车辆还包括根据实用新型提供的控制机构。
所述电磁气阀与所述气控换向阀相邻地安装在所述工程车辆的底盘上,并通过气管与所述气控换向阀连通。
所述工程车辆还包括储气筒,该储气筒与所述电磁气阀的进气口连通,以作为所述气源。
所述工程车辆的线束与所述电磁气阀电连接,以作为所述电磁气阀的所述电源。
,所述工程车辆为自卸车辆,所述液压系统还包括用于控制货箱起落的油缸,所述气控换向阀具有起升工作位置、降下工作位置和缓降工作位置,以分别控制所述油缸对货箱进行起升、降下和缓降作业,所述气控换向阀包括伸出气口、收缩气口和缓降气口,以分别控制所述气控换向阀进入起升工作位置、降下工作位置和缓降工作位置。
[0015]本实用新型的有益效果是:通过电磁气阀驱动气控换向阀工作,利用电磁气阀可与控制该电磁气阀的控制装置分开布设且通过线束电连接的特点,能够实现将电磁气阀与气控换向阀相近布设,这样,使得电磁气阀与气控换向阀之间的连接气管跨度变小,简化本实用新型提供的控制机构的结构,且使得气管输送压缩空气的效果更好,尤其适用于自卸车辆。
[0016]本实用新型的其他特征和优点将在随后的具体实施方式部分予以详细说明。
其中,液压系统还包括单向阀71和滤油箱81,滤油箱81设置在液压栗7与油箱8之间的油管上,以过滤油箱8内的液压油,单向阀71设置在液压栗7的出油管道上,以限制管道内的液压油的走向。
[0042]综上,本实用新型提供的控制机构,工程车辆的液压系统通过气控换向阀1、气源、电磁气阀和控制装置驱动,利用电磁气阀的结构特性,可以将电磁气阀布设至与气控换向阀I相近的位置,这样,使得本实用新型提供的控制机构的结构简单。
[0043]以上结合附图详细描述了本实用新型的优选实施方式,但是,本实用新型并不限于上述实施方式中的具体细节,在本实用新型的技术构思范围内,可以对本实用新型的技术方案进行多种简单变型,这些简单变型均属于本实用新型的保护范围。
[0044]另外需要说明的是,在上述具体实施方式中所描述的各个具体技术特征,在不矛盾的情况下,可以通过任何合适的方式进行组合,为了避免不必要的重复,本实用新型对各种可能的组合方式不再另行说明。
[0045]此外,本实用新型的各种不同的实施方式之间也可以进行任意组合,只要其不违背本实用新型的思想,其同样应当视为本实用新型所公开的内容。
如何解决起重机制动器使用和调整问题?
起重机起升机构中多用长行程电磁铁制动器或液压电磁铁制动器,在运行机构中多用短行程电磁铁制动器或液压推杆制动器。 这几种制动器是靠主弹簧的作用力,通过制动臂使制动带对称地抱在制动轮上。制动带与制动轮的接触面积不应小于制动带面积的75%。各种制动器上的尺寸是主弹簧在正常情况下能发出额定制动力矩的长度。制动器打开时,应使制动带与制动轮之间保持0.6~1.0mm的间隙,并用螺旋杆调整两边间隙相等。为了适应制动带在逐渐磨损过程中,仍然能保持其打开的间隙相等。 制动器工作的好坏,与使用维修直接关系,有制动器本身的问题,也有如何调整和使用制动器的问题。要求能根据实际情况,机动灵活地调整各机构制动器,使其经常保持正常工作状态。 起升机构制动器应调整到能制动住额定起重量,空钩时打开制动器(不通电,用撬杆或其它方法)能自动下滑为宜。太紧会使钢丝绳受过大的冲击负荷,加剧了桥架的震动。 运动机构制动器制动力矩要调整得合适较为困难,特别是短行程电磁制动器的调整,曾有人反映松了不行,紧了不行,不松不紧还不行,不是制动不住就是太紧。原因是通用桥式起重机在工作时所起重物质量不等,运行路程不一样,因而运行速度也不一样,所以在一种条件下合适,而在另一种条件下就不合适。这就要求能根据不同条件合理地操纵,如按中载中速调好的制动器,当调运重载长距离运行时,就应提早制动,使其能有一段较长的制动路程,这对有经验的司机来说不是很难做到。
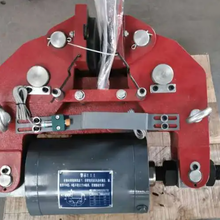
如何调整液压推杆制动器?
在制动器上方有一条长螺杆,两端分别位于两瓣制动瓦上方,其中一端还经一些杠杆机构与推动器相连。简单的调整方法是将所需刹车的马达断电(拆除马达接线盒内的接线,但是同时要注意调整过程中会完全松开刹车),仅将推动器电机加电(一般设计是同时得电),工程机械编辑分析此时调整前述长螺杆一端的螺帽,使得刹车可完全分离,推动器电机断电时,机构回退能使制动瓦抱紧即可
经过计算得到:如果以4t的起吊重量作为轻重载的分界点,“重载区”的作业面积只占“轻载区”作业面积的18%。
而且在工地对塔机的实际运行情况统计,一台配备8t起升机构的塔机,真正起吊4t以上载荷的工况是非常少的。
通过以上的分析有:
塔机的起吊能力减半,80%以上的工况不受影响。
这就给我们提供了一个思路:如果把现有的由一台电动机和一台变频器控制的变频起升机构改变成功率减半的两台电动机和两台小变频器来共同驱动的话,即使有电机或者是变频器出现故障,塔机在绝大部分情况下还是可以照常工作的。这样就大大减少了主机厂的售后服务压力,对用户也十分有利。
对于塔机这种特殊的起重机,如果起升机构采用双变频起升方案就可以:
轻载时,单电机运行,可以达到节能和延长系统寿命的目的;
有一变频器损坏时,可单电机工作,系统将自动断开故障回路,能做到对系统不停机维修,大大地减少了塔机生产厂的售后压力;
有一台电动机出故障后,同样可采用单电机工作方式,在绝大部分工况下不影响塔机工作;
重载下,双电机工作,以的变频性能满足塔机的操作要求;
各功率部件变小,减少了维修成本与难度。
该系统已经过严格的检测和工业考核,性能达到了设计要求。我们以为,本文所讨论的双变频起升机构是为我国塔机行业在变频调速技术的应用上找到了一条可行的新思路,这对提升我国的塔机技术水平、提高系统的可维护性、降低主机厂的售后服务压力以及减小与国外同行的技术差距都有重要的积极意义。
在选择电机功率时,根据以上的条件就能基本确定减速机的减速比与电动机功率和极数。
(2)电控系统的设计
a)变频器的选取
当系统的电动机确定后,就可着手进行控制系统的设计。是变频器的选型。现在市场上的国内外变频器品牌不少,控制水平和可靠性差别较大,技术上大体可分为V/F控制、矢量控制和DTC直接转矩控制三种。用于塔机的起升机构,建议好选用具有矢量控制功能或者是具有DTC直接转矩控制功能的变频器,这样的变频器品牌较多,设计者可根据自己的熟悉程度、技术支持力度、其他行业厂的使用情况等因素来选择。
由于变频器品牌的不同,相同功率下变频器的过载能力和额定电流值也不完全一致。所以,选择变频器容量时,不单要看额定功率的大小,还要校核额定工作电流是否大于或者等于电动机的额定电流,一般的经验是选择变频器的功率大于电动机功率10~30%左右。
b)能耗电阻的选取
作为起重用变频系统,其设计的在于电动机处于回馈制动状态下的系统可靠性,因为这种系统出故障往往都发生在重物下降时的工况,如溜钩、超速、过压等。也就是说重物下降工况时变频系统的性能好坏将直接影响整个起升机构能否安全运行。这就要求设计人员清楚地了解变频传动系统的回馈工作过程,才能做到心中有数。

全国液压推动器制动器热销信息